Сегодня я хочу написать вкратце про "кирпичики" больших р/у моделей - приемники, регуляторы, сервоприводы и моторы. В микровертолетах все это (кроме моторов) обычно интегрировано в одну плату с целью уменьшения габаритов и веса, но в больших моделях каждый из этих элементов представляет собой отдельный функциональный узел, при этом у нас появляется возможность самим подобрать характеристики и стоимость устройств и получить аппарат с теми или иными параметрами. У тех, кто впервые столкнулся с данными устройствами может возникнуть вопрос как соединять все эти узлы между собой. Ничего сложно там нет, но тем не менее иногда имеются некоторые интересные особенности о которых не все могут знать и я постараюсь рассмотреть их в своей статье.
Приемники р/у моделей (Receivers)
Поскольку у меня в хозяйстве в основном семейство Spektrum, то и рассказывать я буду исключительно про приемники DSM2/DSMX. У спектрума есть достаточно много моделей приемников различающихся количеством каналов, массой и возможностями. По размерам и дальности приема они делятся на классы: ultra micro - для ультра-микро моделей самолетов, нередко это приемники со встроенными сервами; паркфлайерные модели - приемники без сателлитов с небольшим радиусом приема (грубо говоря для самолетов которым хватает для полета небольшой лужайки); а также приемники рассчитанные на полноценную дальность. Последние обычно рассчитаны на использование с "сателлитами" - маленькими дополнительными приемниками, которые подключаются к основному чтобы обеспечить пространственное разнесение антенн. Приемники с сателлитами есть не у всех фирм. Например, Futaba, насколько я знаю, принципиально не использует сателлиты, выезжая на лучшей помехозащищенности при кодировании сигнала. Тем не менее, пространственное разнесение антенн - эффективный и сравнительно простой способ увеличить дальность приема. Основное предназначение сателлитов - избежать затенения сигнала материалом корпуса модели, поэтому основной приемник и сателлит размещаются в разных местах модели и желательно под углом друг к другу, а приемник просто берет лучший из двух сигналов в каждый момент времени. Для моделей с полностью карбоновыми корпусами есть специальные типы приемников с выносными модулями для крепления снаружи.
Некоторые спектрумовские приемники также имеют разъемы для подключения модуля телеметрии. Блок телеметрии использует собственный передатчик для отправки на пульт данных с подключенных датчиков - это могут быть уровень сигнала приемника, напряжение батареи, температура, обороты двигателя и т. д.
Также на приемнике обычно имеется лампочка-индикатор показывающая своим миганием или горением текущее состояние связи с пультом.
Несмотря на простоту исполнения, стоимость оригинальных приемников обычно немаленькая. К счастью, на помощь в очередной раз пришли китайцы и наклепали своих версий под самые разные протоколы. Для Спектрумовского DSM2, это Хоббикинговские приемники OrangeRx - шестиканальный OrangeRx R610 , легкие четырехканальные R410 и R415 , семиканальный OrangeRx R710 и девятиканальный R910 ; ну и сателлит к ним: OrangeRx R100 Satellite Receiver . Как показывает практика, пользоваться этими приемниками вполне можно, при этом по цене они без малого на порядок меньше оригинальных. Все они работают только в режиме DSM2.
Подключение приемников радиоуправляемых моделей

Ничего сложного здесь нет. Возьмем для примера шестиканальный спектрумовский приемник AR6100E. У него есть 7 разъемов по 3 контакта. 6 разъемов - это выходы на каналы, они промаркированы в соответствии с общепринятой маркировкой каналов - Thro (Газ), Aile (Элероны), Elev (Элеватор), Rudd (Руль), Gear (Шасси, 5 канал), Aux1 (6 канал). Выводы каналов тоже промаркированы как "-", "+" и управляющий сигнал. Соответственно к каждому из каналов можно подключить сервопривод, либо регулятор напряжения бесколлекторного двигателя, либо еще какую-нибудь электронику и она будет питаться от плюса с минусом и контролироваться управляющим сигналом. Седьмой разъем обычно помечен как Batt и служит для подачи питания на приемник (если оно уже не подается через какой-нибудь другой разъем), а также для переключения приемника в режим "Bind", т. е. для процедуры привязки к пульту. Для переключения в этот режим при включении приемника управляющий контакт разъема Bat должен быть замкнут на землю, обычно для этого втыкается специальная перемычка - "Bind Pug". В приемниках с поддержкой телеметрии, этот разъем также используется для связи с модулем телеметрии. Питание на приемник может подаваться через любой из разъемов "+" и "-", т. к. они все между собой просто-напросто соединены внутри приемника. Точно так же электронные устройства получают питание с приемника - он никак не регулирует напряжение, он просто напрямую передает питание через свои разъемы, соответственно особых ограничений по току здесь нет, но будут ограничения если вы решите подключить какой-нибудь потребитель питания (например, светодиодную подсветку) непосредственно к управляющему сигналу.
Что касается маркировки проводов подключаемых к приемнику устройств, то здесь мне попадалось пока 2 "стандарта" желтый/красный/коричневый и белый/красный/черный, сигнальный провод - желтый или белый.
Бесколлекторные моторы (Brushless motors)
В микровертолетах обычно стоят коллекторные моторы, т. е. моторы с щетками и коллектором. При всей их простоте, у них один огромный недостаток - ограниченный ресурс. Щетки подгорают и перетираются и рано или поздно выходят из строя. У бесколлекторных моторов щеток нет, а кроме того значительно выше КПД, но они требуют использования обязательного электронного узла - регулятора скорости (ESC - Electronic Speed Controller, его еще называют "контроллер"), который контролирует вращение электрического магнитного поля своевременно подавая напряжение на соответствующие обмотки мотора.
Регулятору бесколлекторного мотора необходимо знать положение ротора в каждый момент времени, для этого могут использоваться либо встроенные в мотор датчики, либо импульсы обратного электромагнитного поля (кстати, именно поэтому каждому б/к мотору требуется свой собственный регулятор). Моторы без датчиков проще по конструкции, поэтому в р/у моделях в основном используется второй вариант - контроллер рассчитывает положение ротора на основе времени между импульсом напряжения питания и импульса обратного электромагнитного поля и использует эту информацию для определения фазы и того куда подать следующий импульс напряжения питания. Регулирование скорости вращения мотора происходит с помощью изменения продолжительности импульса питания (широтно-импульсная модуляция) - более длительная серия импульсов создает большее магнитное поле, которое заставляет ротор вращаться быстрее, что вынуждает контроллер увеличивать частоту подачи импульсов.
Со всем вышесказанным связано еще два немаловажных понятия - тайминг регулятора и срыв синхронизации бесколлекторного мотора. Тайминг - это нечто вроде выставления угла зажигания в карбюраторных двигателях. Он определяет сдвиг фазы подачи питания на мотор. Регуляторы обычно позволяют настроить тайминг выбором из нескольких значений. Для каждого мотора и условий его эксплуатации оптимальный тайминг может быть разным. Обычно его определяют по максимальной эффективности работы мотора в его рабочем диапазоне оборотов. Иногда может возникнуть такая ситуация, когда из-за резкого изменения нагрузки или оборотов мотора, регулятор может "упустить" данные о действительном положении ротора и заблокировать подачу питания на мотор, такое явление называется срывом синхронизации. Вероятность этого повышается при неправильно выставленном тайминге. В этом случае придется перезапускать мотор заново.
По исполнению моторы бывают инраннерами (inrunner) и аутраннерами (ourunner), в инраннерах постоянный магнит закрепленн на вращающемся роторе, в аутраннерах - на вращающемся колоколе, т. е. в аутраннерах вращается внешняя часть мотора. Поскольку аутраннеры в силу своей конструкции позволяют использовать большее число магнитных полюсов, то они развивают больший крутящий момент и позволяют обходиться без редуктора, поэтому они больше распространены для р/у моделей. Количество электрических обмоток у бесколлекторных моторов - всегда три, соответственно и подключаются они тремя проводами.
Кроме габаритов и мощности, у мотора есть еще одна важная характеристика - kV. Так принято обозначать коэффициент отношения частоты вращения оборотов мотора (об/мин) к напряжению питания мотора (В). Грубо говоря kV показывает насколько быстро будут вращаться разные моторы при одинаковом напряжении. Для разных моделей, разных используемых шестеренок и пропеллеров требуемый kV мотора подбирается и вычисляется индивидуально.
 Несколько типичных аутраннеров
Несколько типичных аутраннеров
Обычно б/к моторы продаются с крестовиной крепления и адаптером для пропеллера, но иногда комплектация более скудная.
Регуляторы напряжения (ESC)
О том, что такое регулятор (контроллер) скорости и для чего он нужен думаю уже стало понятно из предыдущего пункта. По сути, регулятор представляет собой микроконтроллер с прошитой в него программой и силовые ключи для управления обмотками мотора.
 Несколько типичных регуляторов напряжения со встроенным BEC"ом
Несколько типичных регуляторов напряжения со встроенным BEC"ом
Основная характеристика ESC - максимальный ток который он может обеспечить для питания мотора. Среди моделистов почему-то распространена привычка подбирать регуляторы с большим запасом по току. Это не всегда рационально и примеры из жизни показывают что "впритык" подобранный регулятор работает ничуть не хуже, зато весит и стоит гораздо меньше (по крайней мере это справедливо для питания от трехбаночных аккумуляторов, с ростом напряжения лучше все же иметь запас). А вот по качеству, увы, регуляторы могут сильно отличаться. К сожалению нередки случаи когда регулятор горит из-за внутреннего брака или халтурной сборки, когда кто-нибудь из китайцев решил сэкономить на термопасте.
Конструктивно, чаще всего регулятор представляет собой плату засунутую в термоусадку. Чтобы предохранить электронику от влаги многие моделисты перед установкой регулятора дополнительно герметизируют эти два конца термоусадки с помощью герметика или термоклея.
Регуляторы скорости бывают со встроенным стабилизатором напряжения (BEC - Battery Eliminator Circuit) и без него. Стабилизатор напряжения выдает 5В и используется для питания приемника, серв и прочей рассчитанной на это напряжение аппаратуры. В случае если у вашего регулятора нет встроенного BEC"a, для питания приемника и аппаратуры придется использовать отдельный стабилизатор напряжения - UBEC (Universal Battery Eliminator Circuit). Некоторые специально ставят UBEC для большей надежности (чтобы не зависел от нагрева регулятора), или разносят питание мощных (сервы) и важных (приемник) потребителей на разные цепи. Стабилизаторы напряжения в свою очередь бывают двух типов - линейные и импульсные (обозначаются пометкой Switching). Импульсные стабилизаторы имеют более высокий КПД (особенно хорошие дорогие импульсные стабилизаторы), а следовательно меньше греются. Не рекомендуется запараллеливать питание нескольких стабилизаторов. В случае с линейными стабилизаторами это просто не рекомендуют делать из-за разброса параметров их электронных компонентов, а в случае с импульсными стабилизаторами это делать категорически нельзя. Поэтому, если у вас есть несколько регуляторов скорости со встроенным BEC и вы все их хотите подключить к одному приемнику (как это делается в мультикоптерах), то лучше вынуть плюсовые провода стабилизаторов у всех регуляторов кроме одного.
Микроконтроллер регулятора обычно имеет несколько параметров которые можно настроить. Набор чаще всего стандартный - это тормоз, тип отсечки, тип аккумулятора, напряжение отсечки, тайминг, мягкий старт и частота PWM, но иногда бывают и дополнительные специфичные параметры. Подробнее об этом и о программировании регуляторов я расскажу в следующей статье.
Хочу отметить, что разные модели регуляторов могут иметь различное "предназначение". Например, регулятор отлично работающий в самолете будет совсем никуда не годным в квадрокоптере, или наоборот. Это сложно оценить объективно, поэтому лучше ориентироваться на отзывы из жизни. Иногда практикуется такое развлечение, как перепрошивка программы микроконтроллера регулятора с целью улучшения его характеристик.

Подключение бесколлекторных моторов и регуляторов скорости
Регулятор скорости подключается к б/к мотору тремя проводами. Последовательность соединения не имеет значения, но если мотор вращается не в ту сторону, в которую вам требуется, то нужно просто поменять местами любые 2 провода. В качестве соединительных разъемов обычно используются разъемы типа "Gold Bullet Banana Connector ", они бывают разных диаметров. Сами моторы и регуляторы в зависимости от цены могут продаваться как с уже распаянными разъемами, так и просто с голыми проводами. Впрочем, если не планируете часто снимать/ставить эти детали, провода можно просто спаять между собой.

Подключение остальных проводов регулятора скорости вопросов вызывать не должно - разъем с "фишкой" подключается к требуемому каналу приемника, по этому разъему регулятор получает информацию для управления скоростью вращения двигателя, а если в нем встроенный стабилизатор, то через этот разъем он также питает приемник. Сам регулятор запитывается от аккумулятора (обычно там голые провода, поэтому надо припаять разъем питания, например, ). Современные регуляторы умеют автоматически определять количество банок аккумулятора, так что этот параметр обычно настраивать не требуется). Естественно, диапазон входного напряжения регулятора не безграничен и обычно указывается в его характеристиках. Самые распространенные регуляторы могут работать с аккумуляторами с количеством банок от 2 до 6. Регуляторы рассчитанные на большее количество банок как правило стоят значительно дороже, т. к. именно на 25В проходит граница между сравнительно дешевыми и более дорогими полевыми транзисторами.
Есть один очень важный момент по подключению регулятора , который возможно не все знают - удлинять провода регуляторов не рекомендуется . Если вам все же никуда не деться от удлинения, то: 1. Лучше удлинить провода от контроллера до мотора, 2. Желательно использовать провод большего сечения, чем стоит на регуляторе.
Дело в том, что при удлинении проводов от контроллера до батареи начинает сказываться их индуктивность и может возникнуть ситуация, когда уровень помех по напряжению питания на входе контроллера станет настолько высок, что контроллер не сможет правильно определить положение ротора мотора (иногда при этом еще и "повисает" процессор контроллера). Известно несколько случаев полного "выгорания в дым" контроллеров, при удлинении проводов со стороны аккумулятора до 30см. В то же время, при удлинении проводов от контроллера до мотора всего лишь слегка сдвигается задержка тайминга контроллера. Чем больше напряжение от которого питается регулятор, тем более критичен он к удлинению проводов.
Как резюме
В случае крайней необходимости можно удлинить провод от регулятора до аккумулятора, если сделать это проводом толстого сечения и чтобы итоговая длине в любом случае не превышала 20 см. В остальных случаях лучше удлинять провода на мотор и без лишней необходимости это не делать.
Сервоприводы
Я не буду сильно останавливаться на этом пункте, так как материал по сервам очень обширный и его в двух словах не расскажешь. Напишу основное.
Сервопривод (серва или рулевая машинка, сервомашинка) представляет собой не просто моторчик с резистором и шестеренками, но также и электронную плату которая преобразует сигнал управления с приемника и контролирует работу мотора сервы. Соответственно, сервы бывают цифровыми и аналоговыми. Цифровые сервы имеют внутри микроконтроллер (да, опять он) с программой управления, они работают быстрее и точнее аналоговых, но потребляют бОльшую мощность.
По размерам все сервоприводы делятся на несколько стандартных классов - гигантские, нормальные, мини, микро, нано. Бывают также низкопрофильные сервомашинки уменьшенной высоты. Основные характеристики - скорость перекладки и мощность усилия. Еще два важных свойства - точность отработки и надежность.
На самом деле выбор серв для модели - очень важное и ответственное действие, здесь тоже есть свои фавориты и разница в ценах между дешевыми и дорогими сервами может достигать десятков раз. Поэтому лучше подойти к этому делу ответственно и хорошенько изучить советы и отзывы перед покупкой, т. к. от этого зависит, во-первых, точность поведения модели в воздухе, во-вторых, вероятность потерять модель в один "прекрасный" момент из-за отказа сервомашинки.

Подключение сервомашинок
При подключении серв надо учитывать, что некоторые сервы рассчитаны на работу от повышенного напряжения и питание их от встроенного стабилизатора не позволит им развить полную заявленную мощность. Другая сторона вопроса, что если модель большая и на ней стоят мощные сервы, то максимального тока отдаваемого стабилизатором контроллера может не хватить для их работы, появляется риск просадки напряжения, что очень чревато для работы приемника, поэтому при использовании мощных серв необходимо в обязательном порядке просчитывать их аппетиты и возможности стабилизатора, а еще лучше замерять все это на практике, либо организовывать отдельную линию для питания приемника.
Так же, насколько я слышал, иногда бывают проблемы совместимости некоторых цифровых серв с некоторыми гироскопами, этот момент нужно также учитывать.
Общая картина подключений
Ну, надеюсь с подключениями этих устройств все более-менее ясно. В целом, получается что-то вроде этого:

Длинная статья получилась и занудная, все равно всего не получается охватить, но надеюсь что общее представление мне удалось раскрыть.
Для прошивки вашего регулятора скорости ESC понадобятся программное обеспечение и специальные устройства. Также необходимы знания о соединениях и специфичных установках. Далее будет рассказано о всех необходимом для прошивки и самом процессе.
Для чего это нужно:
Обычные регуляторы имеют внутри программный и аппаратный фильтры, сглаживающий реакцию на резкие скачки управляющего воздействия. Применительно к моделям самолётов и вертолётов — всё правильно, резко изменять газ совершенно ни к чему. Однако, принцип стабилизации мультироторных аппаратов основан на изменении тяги каждого ротора в отдельности. Чем более отзывчив будет регулятор, тем лучше будет стабилизация, меньше колебания, и т.п. Хорошо иллюстрирует это следующее видео от Дмитрия piranha:
И вот ещё один показательный пример.
Ещё один минус «родных» прошивок регуляторов — низкое разрешение. Т.е. регулятор весь диапазон оборотов проходит за, к примеру, 100 шагов. Кастомные прошивки обеспечивают большее разрешение.
Стоит отметить, что после перепрошивки регулятор теряет бОльшую часть своих функций. Не надо спрашивать — а как настроить отсечку, или — а где настраивается софтстарт. Этих функций просто нет. Прошитые регуляторы предназначены исключительно для работы на мультироторах. Исключением можно считать прошивку BLHeli — там пока что присутствуют фишки «фабричных» регуляторов.
Требования
Железо
Устройство программирования.
Вам понадобится дополнительный программатор. Программатор будет подключаться к определенным точкам на ESC для подключения к компьютеру. Существует несколько версий этих программаторов, различных брендов и различного ценового диапазона. Примерная стоимость адаптера 15$
There are several versions of these programmers from different brands and in different price ranges. You should be able to find an adapter around 15$.
Вы можете использовать следующие адаптеры USBasp:
HobbyKing: USBasp AVR Programming Device for ATMEL processors
GoodLuckBuy: USB-ASP Atmel ISP Programmer Download Adapter
ProtoStack: USBASP AVR Programmer
CuteDigi: AVRISP STK500 programmer
Драйвера:
Для Linux и MacOS X не требуются драйвера. А для работы под Windows нужно будет установить драйвер для USBasp:
Также, вам нужно будет подключить программатор к ESC. Можно подсоединяться к ножкам микросхемы или припаять провода к плате регулятора.
Программное обеспечение
В зависимости от установленной системы на вашем компьютере, вам нужно будет установить подходящую программу для прошивки ECS.
Программы для прошивки:
Если на вашем регуляторе есть контакты для прошивки, можете припаять провода к ним или временно подключиться с помощью пинов как на видео ниже. I
Или вы можно использовать подключение к ножкам микроконтроллера с помощью микро зажимов :

Другой метод, изготовить адаптер для программирования с помощью модельного клея. Детально процесс изготовления этого адаптера описан .

Другой похожий адаптер для Amtel Atmega теперь продается в Hobby King :

Теория
MOSI, MISO, SCK…
Связь между ESC и программатором осуществляется по шине последовательного периферийного интерфейса (SPI) . Необходимые соединения в шине называются . Вам нужно правильно подключить пины на ESC и на программаторе.
Фъюзы
Термин fuses (перев. предохранители) не имеет ничего общего с защитными устройствами в обычной электронике.В данном случае термин фьюз относиться к небольшой части микроконтроллера. Микроконтроллер меняет свое поведение в зависимости от того какие фьюзы выставлены. Неправильно выставленные фьюзы могут привести к непредсказуемым последствиям. Функции фьюзов перечислины в документации к микроконтроллеру (datasheet). Последние прошивки от Simonk не требует вносить изменения в фьюзы.
Фьюзы могут быть вычислены или определены с помощью калькуляторов.Например, Engbedded Atmel AVR® Fuse Calculator
Hex файлы
Прошивки для ESC доступны в форме .hex файлов. Один.hex файл содержит полную прошивку для определенного ESC.Вы можете прошить ESC несколько раз, но только последняя залитая прошивка будет активной. Неправильная прошивка может испортить ESC при подаче питания от аккумулятора. Поэтому важно безопасно проверять ваш ESC после обновления прошивки.
Тип ключей (FET)
В ESC применяются ключи типа P или N, а могут применяться оба типа. Регуляторы с ключами типа-N обладают меньшим сопротивлением, меньшими потерями и большей эффективностью. Совместимость.hex файла зависит от типа установленных силовых ключей.
Как определить тип силового ключа FET:
Подключение
Разъем Atmel ISP бывает двух видов, 6-пиновый или 10-пиновый. Ваша задача подключить проводники на ESC (MOSI, MISO, SCK, VCC, RST & GND ) к таким же проводникам на программаторе.
6-pin ISP разъем и 10-pin ISP разъем

Atmega8 распиновка

Пошаговые примеры прошивки.
Пример: Turnigy Plush 18A
В этом примере Turnigy Plush 18A ESC будет прошита в Windows с помощью ESC Flash Tool через USBasp.
Вам нужно подключить программатор к компьютеру, а ESC к программатору. Здесь проводники припаяны к ESC.

Возможно, кому-нибудь пригодится мой опыт создания регулятора скорости для радиоуправляемой модели.
Это было почти 15 лет тому назад, в то время были распространены коллекторные моторы. Бесколлекторные двигатели и контроллеры скорости только начинали появляться и стоили очень дорого. Тогда мне очень нужен был регулятор скорости (ESC) для коллекторного мотора радиоуправляемой машинки. Озадачился этим вопросом и нашел схему, которую самостоятельно мог бы собрать. Детали некоторые были в наличии, что-то прикупил в магазине радиодеталей, все вышло достаточно дешево. Сейчас стоимость нового регулятора не так высока, как раньше, порой бывает дешевле купить, но моделист не ищет легких путей.
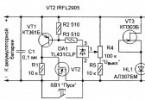
Схема регулятора следующая.
Регулятор работает от 6 до 15 В. Управляющий канал 4,8 - 6 В
Контроллер решил сделать на монтажной плате. Хотя ее можно было и вытравить в кислоте (рисунок был). Для этого потребуется однослойный стеклотекстолит.

Транзисторы
T 1 = BD 676 или BD 678
T 2 = BD 675 или BD 677
T 3 = BD 676 или BD 678
T 4 = BD 675 или BD 677
Резисторы
P 2 = 250 кОм
Сопротивления
R 7 = 2.7 кОм
Конденсаторы
C 3 = 0,010 мФ
Микросхема

Первые тесты показали, что транзисторам приходится очень тяжело, в пиках наблюдались достаточно большие нагрузки. В связи с этим они были выпаяны с платы, приведенным в спецификации транзисторам подобраны более мощные аналоги по каталогу (КТ853В и КТ829А).

Так как при повышении нагрузок выделяется тепло, то его нужно куда-то отводить. Для этого подобрал радиатор. Радиатор использовал от компьютера, старый и ненужный все равно валялся без дела, а тут пригодился. Вентилятор с него решил не снимать, так как источник питания 12В, то подключил напрямую к силовой батарее. Транзисторы прикрутил к радиатору с помощью винтов.

Радиатор распилил на две части, это было необходимо по конструктиву схемы.

Длинные шпильки сверху держат кулер, а с другой стороны прижимают к радиатору транзисторы для эффективного охлаждения. Снизу в качестве изолятора закрепил пластинку стеклотекстолита.
Регулятор нужно откалибровать с помощью переменных резисторов, они позволяют настроить регулятор. Первый отвечает за нулевое значение, второй за максимальный газ. Переводим стик газа в соответствующую позицию и настраиваем регулятор.
В собранном виде все выглядит так.

Для создания миниатюрных моделей с малыми нагрузками охлаждение не требуется. Контроллер без радиатора получился размером 25 Х 25 мм, что достаточно компактно.
Если ESC подвергать высоким нагрузкам, то, безусловно, требуется система охлаждения.
Данный регулятор был установлен на радиоуправляемую машинку вместо электро-механического переключателя. В целом регулятор оправдал ожидания и до сих пор выполняет свою функцию.
Если вы когда-либо задумывались над тем, для чего нужны разные компоненты контроллера, то в статье Джонатана Фелдкампа из Castle Creations вы узнаете о назначении его компонентов, а так же о том как осуществляется управление двигателем. Обладая этими знаниями вы будете лучше понимать какие технологии используются в контроллерах и сможете лучше подобрать модель, подходящую для вашего применения.
Примечание к переводу:
- Аббревиатура ESC (Electric speed controller — Электронный крнтроллер скорости) будет часто заменяться на слово контроллер.
- Аббревиатура BEC (Battery eliminator circuit) будет заменяться на регулятор.
- Аббревиатура MOSFET(FET) (Metal Oxide Semiconductor Field Effect Transistor полевые транзисторы со структурой металл-диэлектрик-полупроводник) будет заменяться на слово ключ.
Основные компоненты и их назначение.
Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Прежде чем мы перейдем непосредственно к контроллеру, полезно будет посмотреть как устроен мотор с точки зрения электричества. Типичный бесколлекторный мотор имеет три обмотки (фазы), будем называть их A, B, C. Фазы могут быть соединены методом «звезда» и методом «дельта».
Схема подключения обмоток бесколлекторного мотора.
На картинке проводники образуют обмотки (фазы) и заканчиваются выводами. Хотя соединения обмоток сильно отличаются внешне, в плане электричества разница не большая.
Важно понимать, что все что мы делаем с фазами A и B, оказывает влияние на фазу С. Почему это важно, мы рассмотрим чуть позже. Так же обратите внимание, что в отсутствие каких-либо внешних сил (например, переменного магнитного поля), фазы это просто замкнутые куски провода, именно такими они являются для контроллера во время запуска мотора.
Работа контроллера заключается в том, чтобы передать мотору энергию батареи. Для передачи энергии контроллер использует MOSFET’ы — силовые ключи, которые могут открываться и закрываться за долю секунды. Условно схему бесколлектрной системы можно представить в сл. виде:
Картинка показывает, что закрывая ключи А и В, которые отмечены красной звездочкой, мы пускаем ток от точки +In через фазы А и В на землю. Ток, протекающий через фазы (они же обмотки), создает магнитное поле, которое притягивает или отталкивает магниты ротора и, таким образом, вызывает вращение.
MOSFET’ы (FET’ы)
Вызвать проворот мотора очень просто, можно просто подключить любые две фазы мотора напрямую к аккумулятору. (Очевидно, что делать этого не стоит, испортите батарею или мотор, если оставите батарею подключенной более чем на тысячную долю секунды. Отсюда следует еще одна из основных задач контроллера — ограничить ток протекающий через фазу при коммутации.) Фокус поддержания вращения в том, что бы открыть два нужных ключа в нужный момент времени и тут же закрыть ключи, пока ситуация не вышла из-под контроля. Пока ток протекает по обмотке, магнит ротора притягивается к обмотке (полюс S к N или N к S), тянет за собой ротор и поворачивает его. Как только магнит проходит обмотку, мы открываем другие ключи так, что бы теперь отталкивать магнит ротора (N от N или S от S) и проталкивать магнит по направлению вращения дальше от этой обмотки. Теперь повторите эту идею для всех трех обмоток и станет ясно, как заставить ротор с магнитами продолжать вращаться. Как только вращение началось, нам остается только переключать обмотки снова и снова, что бы поддерживать этот процесс. Для реального примера рассмотрите следующую фотографию типичного контроллера:
Ключи контроллера.
На фото хорошо видны шесть полевых транзисторов MOSFET, которые используются для включения и выключения фаз. Еще видны провод подключения к приемнику и большой конденсатор, который служит накопителем энергии для контроллера. Мелкие детали это различные фильтры, который нужны для правильной работы контроллера. Мощная пайка контактов обеспечивает протекание больших токов. На следующей иллюстрации поверх фотографии нанесено изображение ключей:

Схематическое изображение ключей.
Теперь, когда мы получили представление о том, как поддерживать вращение бесколлекторного мотора, давайте рассмотрим функциональную диаграмму всего контроллера. В контроллере выделяются четыре основных блока: силовые ключи MOSFET, цепь управления ключами, микропроцессор и цепь определения положения ротора. Схема показывает, как эти части соединены между собой.
Теперь у нас есть представление о том, как работает силовая часть регулятора: MOSFET’ы работают как ключи, открываясь и закрываясь они вызывают протекание тока через обмотки мотора. Иногда мощности одного ключа недостаточно, для мощных регуляторов используются несколько ключей включенных параллельно. Нагрев регулятора практически полностью вызван внутренним сопротивлением ключей, каждый раз увеличивая кол-во ключей на фазу в 2 раза мы соответственно снижаем общее сопротивление ключей в 2 раза. Как альтернативу использованию нескольких параллельных ключей, можно устанавливать более качественные ключи.
Цепь управления MOSFET’ами.
Управление ключами не такая простая задача, как может показаться на первый взгляд. Если посмотреть на электрическую схему, мы обнаружим, что у ключей три контакта. Контакт, по которому ток втекает в транзистор, называется «исток», контакт, по которому ток вытекает, называется «сток», контакт, который отходит в сторону называется «затвор», это переключатель ключа. Для того, что-бы открыть ключ, необходимо на затвор подать напряжение на 5В-10В выше чем подведено к истоку транзистора. Для нижней части ключей (которые подключены к отрицательному контакту батареи) это относительно просто, нам надо подать всего 10 вольт. Для того, что бы открыть верхние ключи, которые подключены к положительному контакту батареи, нужно приложить напряжение на 10 вольт выше чем напряжение силовой батареи. К примеру, если у нас батарея LiPo 4S, к верхнему транзистору подведено напряжение 14.8В, но для того, что бы открыть ключ, к затвору нужно подвести напряжение в 25В. Разработчики регуляторов используют готовые блоки управления ключами, или разрабатывают собственные.
Блок определения положения ротора.
Для того, что бы знать, когда открывать и закрывать ключи, регулятор должен знать положение магнитов ротора вращающегося мотора. Это самая хитрая функция регулятора и именно поэтому раньше моторы и регуляторы использовали дополнительные датчики определения положения ротора (схема с сенсором до сих пор популярна в автомодельном хобби). Бессенсорные регуляторы, как видно из названия, обходятся без сенсора и используют уникальный алгоритм определения положения ротора: в каждый момент времени регулятор использует только 2 фазы для питания мотора, третья фаза при этом полностью отключена. Вращающееся магнитное поле наводит ЭДС в третьей обмотке. Измерив и проанализировав наведенное напряжение, можно определить как далеко провернулся магнит, и понять когда нужно закрыть текущую пару ключей и открыть следующую.
Микроконтроллер и его программное обеспечение.
Без сомнения, микроконтроллер это мозг всего процесса. Принцип его работы во многом схож с обычным компьютером: программисты пишут программу, компилируют и загружают ее в память контроллера. Микроконтроллер выполняет программу и в соответствии с ней посылает управляющие сигналы в цепь управления ключами, определяет положение мотора, обрабатывает сигналы с приемника, вычисляет требуемую выходную мощность и мигает светодиодом. Обработка сигнала с приемника стандартна. Управляющий сигнал это серия импульсов, длина которых определяет выходную мощность. Ширина импульса в 1мс означает полностью убранный газ, 2мс — полностью открытый. Величина частичного открытия газа определяется шириной импульса между этими двумя значениями. Внешне все просто, но микроконтроллеру важно при этом еще и успевать отслеживать положение мотора, что бы не пропустить момент переключения ключей.
Работа мотора на среднем газу гораздо более сложный процесс, нежели работа на полном газу. Вместо того, что бы оставить два ключа открытыми на определенное время, микроконтроллер открывает один ключ и быстро начинает открывать и закрывать второй. На малом газу второй ключ закрыт большую часть времени, в то время как при приближению к полному газу, он открыт почти все время. Частота, с которой контроллер открывает/закрывает второй ключ, называется PWM-частотой.
Физические возможности регуляторов: 4s, 6s, HV, SHV и т.д.
Кроме деления по возможностям настройки, регуляторы так же делятся по физическим возможностям. Некоторые регуляторы рассчитаны на напряжение питания 12В, в то время как другие поддерживают батареи до 90В. Впрочем, с точки зрения микроконтроллера и его программы, задача одна и та же — переключать ключи по мере вращения ротора. Наиболее очевидное изменение, это детали, которые используются на печатной плате. FET’ы должны быть рассчитаны на более высокое напряжение, что зачастую, означает, что они имеют более высокое сопротивление, а стало быть не так хороши. Блок управления ключами должен иметь возможность поднимать напряжение еще выше и управлять бОльшим количеством ключей. Входные конденсаторы должны быть другими, обычно значительно больше по размеру. Проще говоря, каждый элемент регулятора должен быть проверен на соответствие высокому напряжению. Кроме очевидных вещей с ростом напряжение многое становится несколько более проблемным. Небольшие скачки напряжения при переключении, которые на 12 вольтах не играют никакой роли, с ростом напряжения могут быть достаточно большими, что бы открыть ключ, который не должен быть открыт в данный момент. (Представьте себе, что ключи на верхнем и нижнем уровне открыты в один момент времени — это равносильно короткому замыканию батареи.) Контроллеру требуется дополнительная аккуратность при работе с входным сигналом, что бы все операции проходили правильно.
ВЕС: Battery eliminator circuit (блок исключения батареи)
Другая сложность с высоким напряжением это BEC. Вспоминаются те далекие времена, когда все пользовались двигателями внутреннего сгорания в качестве силовой установки, а для питания бортовой электроники было достаточно небольшой батареи. Когда электрическая тяга и регуляторы стали более популярными, в них стали встраивать небольшой линейный блок питания бортовой электроники — BEC, который создает источник тока напряжением 5В и может заменить батарею бортового питания. Простой BEC отлично работает с сервоприводами, которые не потребляют много тока, и особенно хорошо работает при небольшом напряжении силовой батареи. Проблема обычного BEC в том, что он переводит излишек напряжения в тепло. Если у нас силовая батарея 12В, то от 6В надо избавиться. Если наши сервоприводы потребляют 1А тока, то 6Вт будет переведено в тепло. Если же у нас батарея 25В, то уже 20В надо перевести в тепло и при токе в 1А, мы получим уже 20Вт тепла. Это слишком много для линейного BEC и он просто перестанет работать при такой нагрузке.
Следующим шагом в развитии стало появление импульсных BEC. Импульсные BEC работают аналогично контроллерам, используют FET ключи для быстрого включения и выключения питания от батареи, далее полученные импульсы сглаживаются для получения на выходе постоянного напряжения. Наиболее важное преимущество импульсного BEC это то, что излишек напряжения не переводится в тепло, а КПД может легко достигать 90%.
Выбор правильного контроллера.
Теперь, когда мы знаем несколько больше о том, как работает ESC, нам проще выбрать правильный контроллер для нашего применения. Предположим, что мы уже выбрали мотор и батарею. Теперь нам надо прикинуть, какой ток будет потреблять наша силовая установка. Выбирайте контроллер, который имеет рейтинг выше чем ток полного газа (к примеру если 67А это худший случай, то контроллера на 75А будет достаточно). Стоит сказать, что нет никакой проблемы в том, что бы использовать контроллер, превышающий ваши потребности, если он не утяжеляет вашу модель.
После сборки полезно сделать коротки пробный полет и проверить температуру контроллера, затем сделать более продолжительный полет и проверить температуру еще раз, что бы убедиться, что она не выходит за безопасные рамки. Температура контроллера должна оставаться ниже 85С и регулятор не должен шипеть, если прикоснуться к его корпусу смоченным пальцем. Калькуляторы силовых установок могут ошибаться, и каждый вертолет летает немного по-разному, поэтому дополнительная осторожность при первых полетах не повредит.
Заключение
Как вы видите, контроллеры имеют относительно простую конструкцию, однако хорошее программное обеспечение и качественные компоненты жизненно важны для правильной работы. От правильного выбора контроллера зависит, будет или не будет модель обладать дымовым эффектом, которого вы, возможно, вовсе и не желаете;-). Отдельное спасибо Джонатану Фелдкампу и команде Castle Creations за их вклад в наше хобби.
Дополнение: почему работа на среднем газу менее эффективна и сильнее нагружает контроллер.
Прежде чем мы рассмотрим, почему работа на среднем газу может увеличить потребление тока, нужно кратко рассмотреть явление обратной ЭДС (back EMF-electromotive force). Во время работы мотор не только потребляет энергию, создавая вращение, но и работает как генератор, вырабатывая электроэнергию — обратную ЭДС. (Примечание aarc: Если предположить, что мотор не имеет внутреннего сопротивления, не теряет энергию на трение и вращается без нагрузки, то он будет набирать обороты до тех пор, пока не сравняется напряжение подводимое от батареи и величина обратной ЭДС, после чего потребление тока станет равно нулю, а ротор продолжит вращаться с постоянной скоростью. Если теперь нагрузить мотор, например заставить вращать ротор вертолета, то появится эффект проскальзывания, когда ротор будет вращаться медленнее, чем мог бы при данном напряжении, а величина подводимого тока будет больше чем ток обратной ЭДС. Эта разница токов и совершает полезную работу. (http://en.wikipedia.org/wiki/Brushless_DC_electric_motor) В результате мотор работает с проскальзыванием, из-за того, что часть энергии идет на совершение полезной работы, а часть на преодоление обратного тока, и чем выше нагрузка, тем сильнее проскальзывание и больше тока потребляет мотор.
Работа на среднем газу или в режиме гувернера(тот же средний газ) нагружают контроллер, несмотря на то, что он дает более короткие импульсы питания, тем не менее под нагрузкой ток импульсов увеличивается. При снижении оборотов обратная ЭДС уменьшается и разница токов обратной ЭДС и мгновенных импульсов питания может быть очень большая. Ватт-метры не могут показать эти броски тока, а отображают только средние значения.
В этой статье мы обсудим что такое ESC регуляторы оборотов, что это такое и как они работают. Также расскажем, как правильно подобрать регуляторы оборотов и предложим вам на выбор несколько рекомендованных наименований регуляторов.
ESC — electronic speed controller, переводится как электронный контроллер скорости. В русскоязычном сообществе принято называть их как «регуляторы оборотов», в простонародье «регули» или «регуляторы».
Что делают ESC регуляторы оборотов и как они работают?
Какие задачи у ESC? Для понимания без углубления — все очень просто, регуляторы оборотов, исходя из названия — регулируют скорость оборотов двигателей ориентируясь на команды контроллера полета. Чем быстрее вращается двигатель, тем больше он создает тягу, тем быстрее летит квадрокоптер.
То, как ESC взаимодействуют с двигателями, влияет на скорость и тягу дрона, а также его поведение в воздухе.
На сайте miniquadtestbench.com, QuadMcFly при тестах обнаружил, что разница в тяге между лучшим регулятором и худшим составляет в пределах всего 20%. В сравнение могу привести выбор автомобиля среди различных марок и выбор хорошего регулятора даст вам столько же мощи как и правильно выбранный двигатель автомобиля (точнее, автомобиль с хорошим двигателем).
Как «общаются» регуляторы оборотов (ESC) с контроллером полета?
Для простого понимания — контроллер полета посредством специального протокола посылает данные регулятору оборотов, что нужно прибавить или убавить газ на двигателе. Но двигателю квадрокоптера нельзя просто подать напряжение, так как он трехфазный и требуется попеременно подавать напряжение на определенные участки обмотки. Этим и занимается регулятор оборотов. На нем есть микросхемы, которые называются Мосфеты (MOSFET), и эти платы выполняют роль ключей — открывают и закрывают подачу тока на определенные участки обмотки.
Как уже говорилось выше, для общения полетный контроллер — регулятор оборотов, используются протоколы. В списке ниже, ESC регуляторы оборотов поддерживают различные протоколы, например Dshot1200, Dshot600, Oneshot125, Multishot. Они отличаются скоростью обмена данными, чем выше скорость, тем быстрее будет отзыв двигателей на ваши команды.
Старайтесь выбирать регуляторы, которые поддерживают более современные протоколы, но при этом убедитесь, что ваш полетный контроллер тоже поддерживает этот протокол.
Как выбрать регулятор оборотов (ESC)
На что следует обратить внимание при выборе ESC регуляторов оборотов? Для новичка будет сложновато, но мы постараемся описать как можно подробнее и охватить все параметры. В любом случае, ниже будет список рекомендованных ESC, что существенно упростит вашу задачу по выбору.
В описании указывается как «Power rating» или «Constant». Для квадрокоптеров класса мини и микро(обычно мини дроны строятся на раме размером до 220мм. .) используются 3 основных номинальных мощности:
- <18А;
<18А: такие регуляторы используются на микро-дронах и мини, но с рамами до 180мм, так как с рамами выше вам просто не будет хватать мощностей.
20А: На мини-дронах чаще всего используют регуляторы на 20 ампер: то есть у вас рама 180-220 миллиметров и пропеллеры размером до 6 дюймов + аккумулятор 3-4S.
30А: Сейчас это стандарт для гоночных квадрокоптеров и с такими регуляторами вы получите отличный дрон для гонок и фристайла. Рамы можно использовать для гоночных размером до 250мм.
Есть регуляторы с еще большей мощностью, но это уже значительно выше цена, размер и вес.
Пиковая мощность или взрывная мощность
В описании указывается как «Burst power rating». Это количество мощности, которое регулятор сможет обработать в короткий промежуток времени. Это довольно важный параметр для гоночных мини дронов, так как часто на гоночных происходит резкое изменение скорости — сейчас вам нужно погасить скорость, чтобы пролететь препятствие и следом резко дать полный газ для ускорения.
Поддержка аккумуляторов
Все регуляторы из нашего списка поддерживают аккумуляторы LiPo 4-6S, но сейчас все чаще некоторые собирают дроны 5S и 6S, поэтому, если вы купите регулятор с поддержкой 6S, а сами соберете дрон на 3S, например, то это будет пустая трата денег. Какой у вас аккумулятор? Вот под такой и ищите регулятор, это тоже указывается в характеристиках, как указано на скрине выше.
Форм-фактор (размер)
Форм-факторы ESC регуляторов оборотов бывают 3 типов:
- Для крепления на лучах рамы;
- 4 в 1 — для крепления над или под полетным контроллером;
- Каждая плата регулятора имеет размер 35х35мм и собирается башней над полетным контроллером или под ним.
Чаще всего покупают регуляторы для крепления на лучах рамы, так как такие проще поменять в случае необходимости, да и проще следить за их состоянием. Крепятся они обычно пластиковыми стяжками:
4 в 1 — это одна большая плата размером с полетный контроллер, которая крепится над или под ним. Придумана для экономии места и веса и используется в основном на микро-дронах, но сейчас набирает популярность и на мини. Но есть один минус — если выйдет из строя один регулятор, придется менять всю плату целиком.
Отдельные регуляторы 35х35мм используются как раз для исключения проблемы выше и крепятся над или под полетным контроллером. Удобство в том, что ничего не висит на лучах рамы, особенно если рама маленькая с тонкими лучами. Если сгорит один регулятор — можно будет легко заменить его, в отличие от 4 в 1.
Вес
Каждый регулятор имеет свой вес, их 4 штуки — значит вес одного умножаем на 4. В этом плюсы 4 в 1 — плата весит меньше, чем по отдельности. Ищите наиболее легкие платы, чтобы дрон был наиболее маневренный. Здесь сэкономите, на камере сэкономите, на антеннах и так далее — в итоге сэкономите 50-100гр.
Прошивка регуляторов оборотов
Эта информация всегда пишется магазином. Самые известные:
- BLHeli. Пользовался популярностью в 2015-2016 годах. После чего эту прошивку заменила следующая версия — BLHeli_S. Сейчас не используется.
- BLHeli_S — создавался для контроллеров ВВ1 и ВВ2. Регулятор под управлением этой прошивки работает значительно плавнее. S — здесь обозначает ту самую «плавность».
- BLHeli_32 — в данный момент на большинстве регуляторов используется именно эта прошивка. Она распространяется с закрытым кодом и в ней уже есть возможность настроить в регуляторах телеметрию, настроить светодиоды и другое.
Регуляторы с BLHeli_32 немного дороже, так как у них есть датчики и телеметрия. В гоночных дронах обычно эту «мишуру» не используют, но если вы хотите — то почему нет?) - KISS — прошивка для регуляторов, которые работают с полетным контроллером KISS.
- SimonK — некогда популярная прошивка, которая теперь вышла из под контроля. Не рекомендуем покупать регуляторы с этой прошивкой.
Чип контроллера
Уже давно не является определяющим параметром, но в спецификациях иногда его указывают. У регуляторов BLHeli_S или BLHeli_32 с поддержкой DSHOT всегда хорошие чипы.
Провода
Оптимальным вариантом считается припаивание проводов мотора сразу к плате регулятора, но часто в продаже находятся регуляторы со своими проводами и приходится либо отпаивать их, либо паять провод-провод.
Аппаратный PWM драйвер
Если эта функция есть (ее может и не быть) на ваших регуляторах, то моторы станут работать на них немного тише и немного эффективнее. Также функция обеспечивает более точный контроль, но на практике это мало кто заметит.
Как это работает: управление скоростью вращения двигателей осуществляется путем повышения или понижения напряжения, подаваемого на моторы. Это регулируют полевые транзисторы (мосфеты), те самые квадратики на плате, они открываются и закрываются, управляя процессом вращения двигателя. Время открытого и закрытого состояния мосфетов напрямую зависит от подаваемой мощности.
Так вот, до недавнего времени, этот процесс управлялся только чипом, управляющим регулятором. KISS добавили еще один чип, который отвечает только за процесс выдачи сигнала.
Благодаря этому, регуляторы, а точнее моторы работали на них очень гладко и сообществу пилотов это очень понравилось.
Помимо KISS, аппаратный PWM драйвер есть и у регуляторов BLHeli_32.
Что еще нужно учитывать?
Параметры выше важные, но также нужно учитывать энергопотребление самих двигателей . Несомненно, что регуляторы на 30 Ампер покроют потребность почти всех двигателей и поэтому об этом было решено написать в конце, чтобы окончательно не запутать вас, потому что придется смотреть в таблицу с характеристиками двигателя:

Блок Load Current (A) — то есть, сколько в пиковой нагрузке будет потреблять двигатель. В нашем случае это Racerstar 2205 и в пике он потребляет 27.6 Ампер, что полностью покрывают регуляторы оборотов на 30 Ампер.
Ниже представляем вам список рекомендованных регуляторов оборотов, которые по нашему мнению заслуживают внимание и которые можно покупать, не опасаясь плохой работы. За цену ничего не можем сказать, так как курс рубля часто меняется, а наши друзья китайцы продают все в долларах.
Также, можете упростить себе задачу и искать регуляторы с прошивкой BLHeli_32 или _S (но S уже все же устаревшая прошивка на 2019 год) и с мощностью 20-30 Ампер. Если вы новичок, то таких параметров вам точно хватит, не ошибетесь.
| Название | Мощность (Амперы) | Поддержка аккумуляторов | Цена за комплект (USD) | Прошивка | Магазин |
|---|